-
カテゴリ別 最新ニュース
-
2026-03-19
リリース
-
2026-01-21
イベント/セミナー
-
2026-01-07
経営/財務
-
-
災害調査活動
-
2026/01
-
2025/11
-
2025/08
UPDATE (08/24)
-
2025/08
-
2025/03
UPDATE (04/03) -
2025/04
-
カテゴリ別 最新ニュース
2026-03-19
リリース
2026-01-21
イベント/セミナー
2026-01-07
経営/財務
災害調査活動
2026/01
2025/11
2025/08
2025/08
2025/03
2025/04
2025/06/18
お知らせ
2025年6月18日
国際航業は、この度、内閣府・科学技術振興機構が推進するムーンショット型研究開発事業・目標3「自ら学習・行動し人と共生するAIロボット」プロジェクトの一環として、筑波大学 システム情報系 永谷圭司教授がプロジェクトマネージャーを務める「多様な環境に適応しインフラ構築を革新する協働AI ロボット(Collaborative AI Field robot Everywhere、CAFEプロジェクト)」が実施する、河道閉塞対応ロボットシステムの公開実証実験に参画します。
〈公開実証実験〉
日時:2025年7⽉10⽇(⽔)13:00〜16:00(12時30分受付開始)
場所:九州⼤学伊都キャンパス内 実験フィールド(九州⼤学 伊都キャンパス)
本実証実験は、大雨や地震の後に発生する崖崩れによる河道閉塞に対し、これまでの人力に頼っていた危険な災害対応を、ドローンや小型建設ロボット群によって実現するものです。河道閉塞が決壊すると重大な災害につながる恐れがあるため、今回のロボットシステムは、二次災害の危険を伴う過酷な現場での応急復旧作業を、より迅速かつ安全に進めることを目指します。
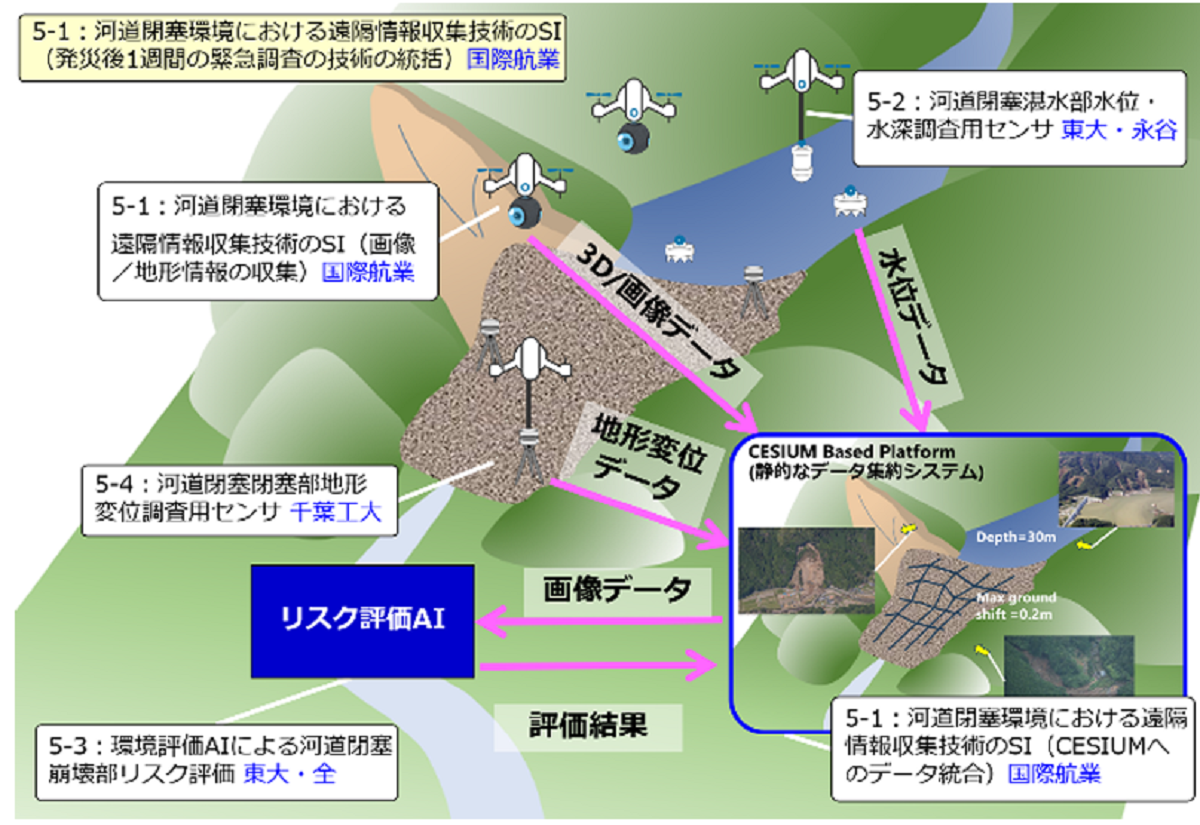
データ集約システム概略
※公開実証実験の詳細は下記PDFをご覧ください。
(本実証実験は報道機関向けとなっております。)
国⽴⼤学法⼈筑波⼤学、国⽴⼤学法⼈九州⼤学 プレスリリース(2025年6月16日付)
自然災害対応ロボットシステムの公開実証実験のご案内
国際航業株式会社 コーポレート統括本部 組織運営企画部 広報グループ
E-mail:info-kkc@kk-grp.jp
このページをシェア
![]()
Copyright © Kokusai Kogyo Co., Ltd. All Rights Reserved.